As the title suggests, the project is all about utilising Motion Controlled Robotic Arms using a leap motion sensor. This particular project was inspired by my interest in watching Pacific Rim and having giant robots that are controlled from the inside by us.
I will be programming them using Python and C. Why, however, are we using these two languages in particular? Elementary, due to three simple reasons. First, both support object-oriented programming (especially Python), an attribute that would benefit us greatly in the creation of this project. Second, C complements Python with the ability to program real-time embedded controllers and others. Third, Python supports the ROS (Robotics operating system), which is a great tool to have when we are dealing with Robotics.

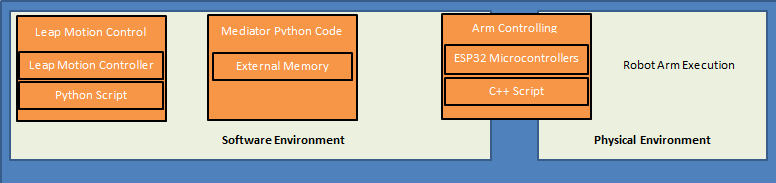
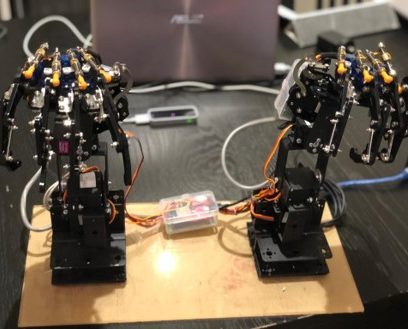
The project required two 8 DOF (Degrees of Freedom) robotic arm, one for left and one for right, containing a servo that operates a claw with 5 fingers, resembling a regular human hand, one leap motion controller, and two ESP32s.
The process of connecting to hand from the ESP32 was simply a matter of sending the connection request from the ESP32, with it serving as the control module, and the coordinates from the Leap Motion sensor being translated into the coordinates to move the hand.